Nu - Crawler
BOILER - STEAM GENERATOR - HP PIPELINE INSPECTION
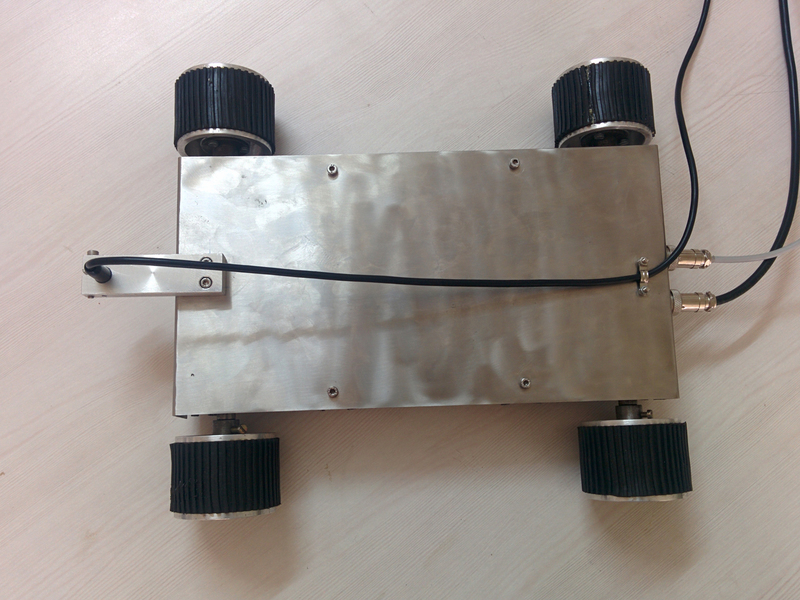
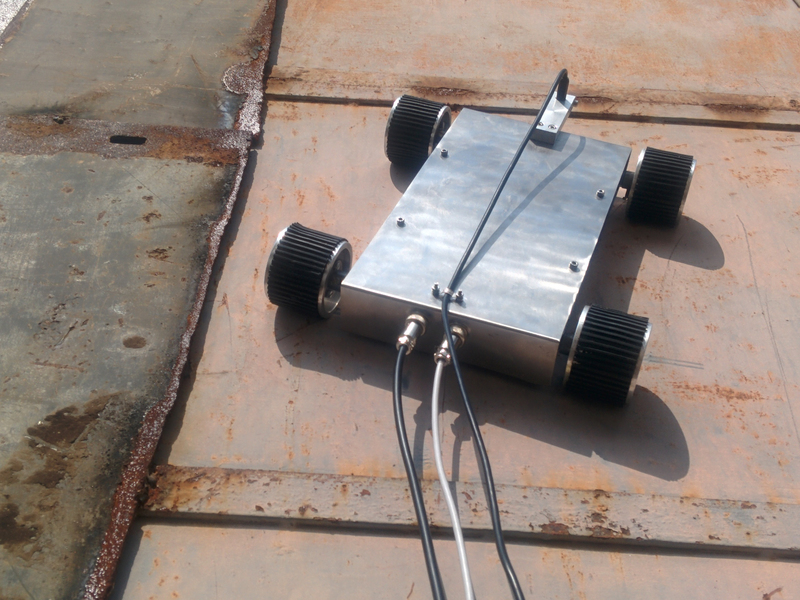
This is a Nu - crawler which can climb vertical and inclined surface using strong magnets built inside the body of the robot. This crawler is useful in inspection and operations related to surface quality analysis , defect inspection or welding and grinding work on the ferromagnetic structures.
The robot is internally powered by four strong geared motors and pedometer sensor to track the motion increment. The robot is rugged in nature and can climb on planar surfaces as well.
This robot is useful in the dirty and dangerous environments specially where manual inspection and operations are not possible.

INSPECTION ROBOT
Features
Strong Neodymium Magnets
Remote Inspections
Can Climb planar Surface
Speed 10 mm/second
Pulling Force 10 kg
Omni directional Motion using Remote Control
Camera
Grinder and Welding
Specifications
| Model Number | GB-NC |
| Wheel | Four Wheel Drive |
| Magnets | Strong Neodymium Magnets |
| Speed | 10 MM/Sec |
| Payload | 1 Kg |
| Motion Resolution | 10 MM |
| Cable Length | 10 Meter |
| Robot Weight | 1 Kg |
| Motion | Omni Directional |
| Attachements | Camera, Grinder, Welding |
| Material | Aluminium |
Gallery